近日,第七届全球校园人工智能算法精英大赛“神思智飞具身智能挑战赛”全国总决赛在济南落下帷幕。玩偶姐姐
玩偶姐姐
(物联网学院)选派的两支参赛团队表现出色,斩获全国二等奖1项、全国三等奖1项。
大赛聚焦具身智能前沿方向,设置自主探索穿越、空中执法、空地协同三大赛题,要求选手基于神思智飞模组完成多源感知融合、自主决策与协同控制等全链路任务,全面考察算法设计、硬件调试与场景应用能力。
在“空地协同挑战赛”中,樊铭举、乔明星、曲天一、张磊四位同学构建了“多源感知-信息融合-分布式决策-协同控制”一体化方案。无人机(大疆Mavic 3)负责高空全局侦察与远距离目标识别,无人车(大疆RM底盘)融合红外激光雷达、IMU及里程计数据,并搭载高清摄像头,实现实时自主避障与目标精准识别。目标检测模块基于EasyOCR,通过GPU加速推理,结合图像增强与多方向识别,有效提升了识别精度与实时性。空地通信采用TCP与UDP混合传输协议,保障数据实时交互,最终在未知环境下成功完成字符目标的精准识别与协同锁定,荣获全国二等奖。
在“自主探索穿越挑战赛”中,钱雨静、张语欣、朱鹏文、冯浩四位同学基于ROS框架开发了多传感器融合自主导航系统。系统融合激光雷达与视觉信息,通过开口检测与孔洞识别算法,优先选择宽度在0.45–0.70米区间内的目标孔洞进行穿越。视觉模块实时检测白色摆锤等动态障碍与绿色终点区域,结合有限状态机完成探索、死胡同处理与终点冲刺等模式切换,实现动态避障与自主回溯。系统还引入里程计辅助定位与安全盒约束,保证运动轨迹平滑稳定,最终在未知环境中完成自主导航与障碍穿越,可靠抵达终点,荣获全国三等奖。
具身智能是人工智能从认知走向行动的关键突破,也是未来产业竞争的前沿赛道。未来,学院将继续秉承以赛促学、以赛促教的理念,推进“教学-竞赛-科研”一体化育人模式,加强产学研用协同创新,紧扣人工智能产业发展趋势和人才需求,持续加强学科建设和师资队伍培养,搭建更多高水平的实践竞技平台,不断提升学生的创新思维和工程实践能力,着力培养更多适应人工智能产业发展的高素质复合型人才。
参赛团队合影
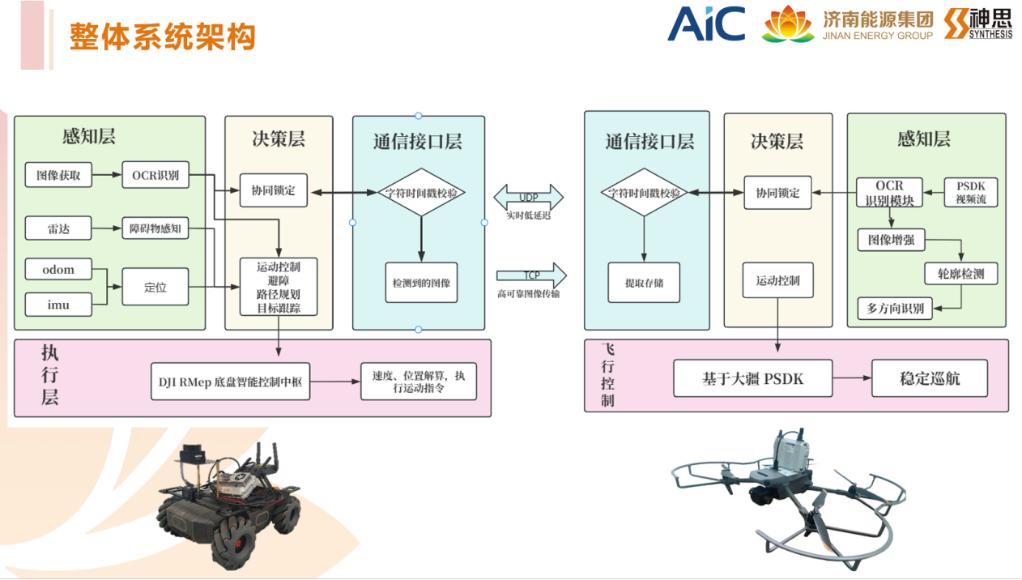
空地协同挑战赛参赛作品(一)
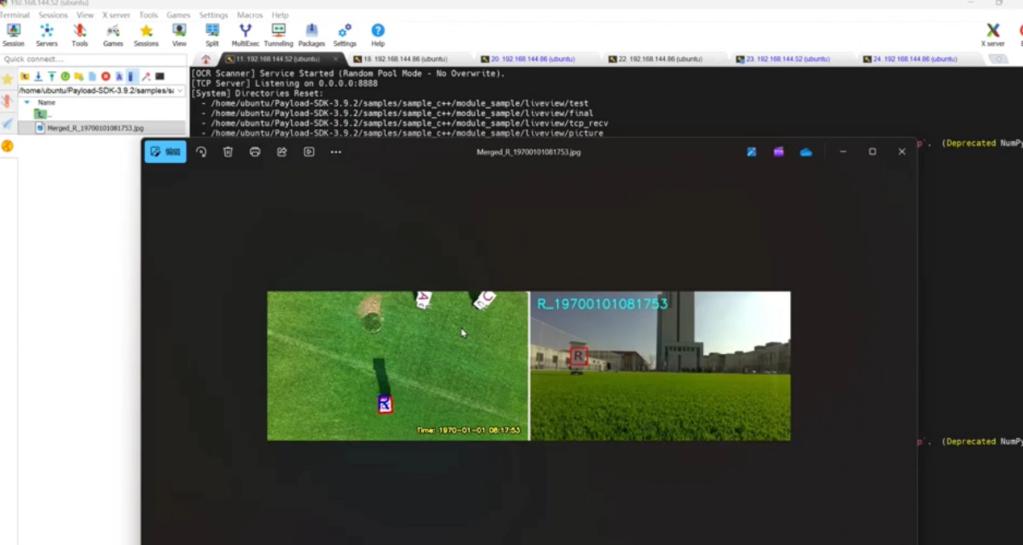
空地协同挑战赛参赛作品(二)
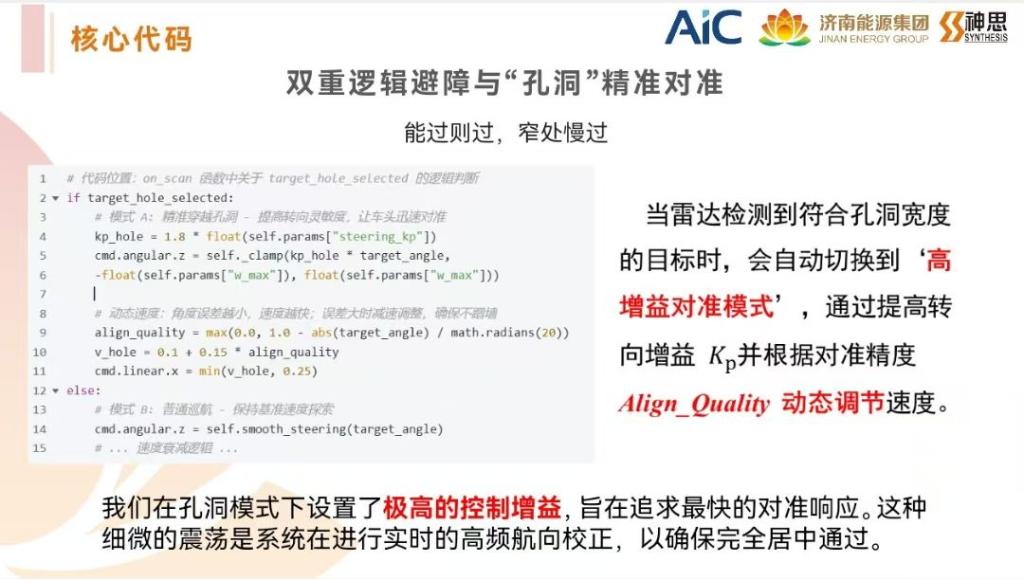
自主探索穿越挑战赛参赛方案

比赛现场



